Product type: WB6P
Logistics robot for the factory
Workerbot6p - Logistics robot for the factory
With the help of the workerbot6p logistics tasks in a production can be automated. The robot can recognize parts e.g. in a tray and take them out of the tray with its gripper. A gripper station with vacuum or mechanical gripper is available for different types of parts at the back side of the robot. The gripper can be changed automatically.
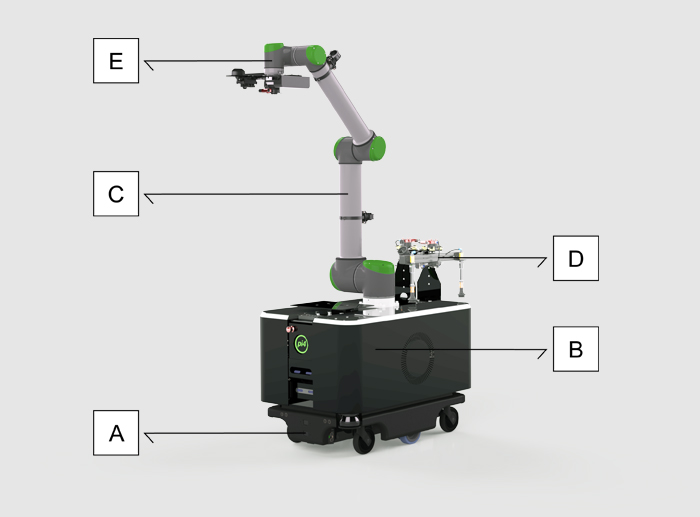
| E | Gripper and 3D camera |
| D | Gripper station for different grippers |
| C | articulated arm robot |
| B | Master Control Unit, Image processing Unit, Vacuum Unit, Power Unit |
| A | Mobile robot |
The robot can idendify the part to be gripped by means of a QR code and then localize it using its 3D image processing algorithms. After selecting the appropriate gripper, the parts are automatically picked from the tray or a deposit. For transport, the robot arm is moved into a special pose and the automatic travel to the target position starts.

Features
- can move independently within the factory
- autonomous avoidance of obstacles
- orientation by means of a created digital map
- gripping of parts by vacuum suction cup or with mechanical 2- or 3-finger gripper
- automatic recognition of parts by 3D camera with image processing algorithms
- recognition of part number by QR or barcode reader
- suitable for UR3(e), UR5(e) or UR10(e) robots
- power supply via integrated rechargeable battery
- automatic battery charging at docking station